Toward a hybrid exoskeleton for crouch gait in children with cerebral palsy: neuromuscular electrical stimulation for improved knee extension, Journal of NeuroEngineering and Rehabilitation
Toward a hybrid exoskeleton for crouch gait in children with cerebral palsy: neuromuscular electrical stimulation for improved knee extension, Journal of NeuroEngineering and Rehabilitation
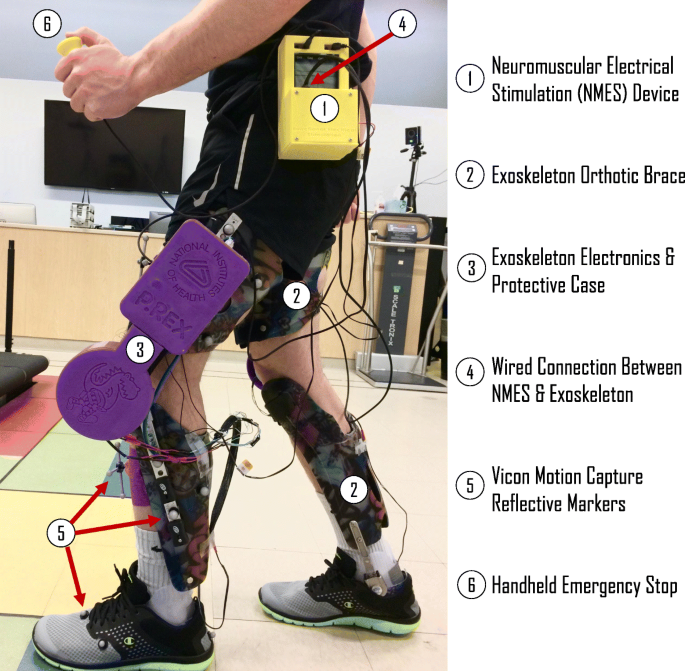
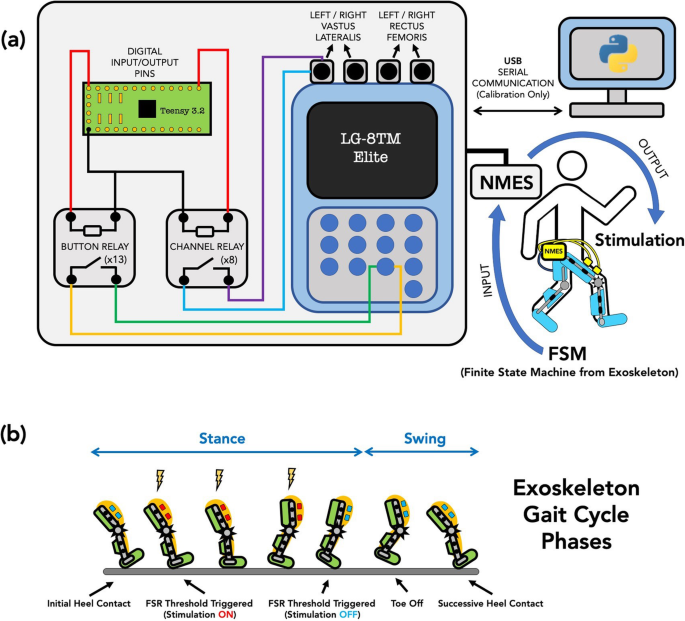
Background Neuromuscular Electrical Stimulation (NMES) has been utilized for many years in cerebral palsy (CP) with limited success despite its inherent potential for improving muscle size and/or strength, inhibiting or reducing spasticity, and enhancing motor performance during functional activities such as gait. While surface NMES has been shown to successfully improve foot drop in CP and stroke, correction of more complex gait abnormalities in CP such as flexed knee (crouch) gait remains challenging due to the level of stimulation needed for the quadriceps muscles that must be balanced with patient tolerability and the ability to deliver NMES assistance at precise times within a gait cycle. Methods This paper outlines the design and evaluation of a custom, noninvasive NMES system that can trigger and adjust electrical stimulation in real-time. Further, this study demonstrates feasibility of one possible application for this digitally-controlled NMES system as a component of a pediatric robotic exoskeleton to provide on-demand stimulation to leg muscles within specific phases of the gait cycle for those with CP and other neurological disorders who still have lower limb sensation and volitional control. A graphical user interface was developed to digitally set stimulation parameters (amplitude, pulse width, and frequency), timing, and intensity during walking. Benchtop testing characterized system delay and power output. System performance was investigated during a single session that consisted of four overground walking conditions in a 15-year-old male with bilateral spastic CP, GMFCS Level III: (1) his current Ankle-Foot Orthosis (AFO); (2) unassisted Exoskeleton; (3) NMES of the vastus lateralis; and (4) NMES of the vastus lateralis and rectus femoris. We hypothesized in this participant with crouch gait that NMES triggered with low latency to knee extensor muscles during stance would have a modest but positive effect on knee extension during stance. Results The system delivers four channels of NMES with average delays of 16.5 ± 13.5 ms. Walking results show NMES to the vastus lateralis and rectus femoris during stance immediately improved mean peak knee extension during mid-stance (p = 0.003*) and total knee excursion (p = 0.009*) in the more affected leg. The electrical design, microcontroller software and graphical user interface developed here are included as open source material to facilitate additional research into digitally-controlled surface stimulation ( github.com/NIHFAB/NMES ). Conclusions The custom, digitally-controlled NMES system can reliably trigger electrical stimulation with low latency. Precisely timed delivery of electrical stimulation to the quadriceps is a promising treatment for crouch. Our ultimate goal is to synchronize NMES with robotic knee extension assistance to create a hybrid NMES-exoskeleton device for gait rehabilitation in children with flexed knee gait from CP as well as from other pediatric disorders. Trial registration clinicaltrials.gov, ID: NCT01961557 . Registered 11 October 2013; Last Updated 27 January 2020.

Figure 1 from Development and evaluation of a novel robotic

An Approach for the Cooperative Control of FES With a Powered

PDF] A robotic exoskeleton to treat crouch gait from cerebral
Frontiers Lower extremity robotic exoskeleton devices for
Toward a hybrid exoskeleton for crouch gait in children with

Children with cerebral palsy see benefits with robotic exoskeletons
Systematic review on wearable lower-limb exoskeletons for gait

Robotic exoskeleton alleviates crouch gait in children with

PDF) Toward a hybrid exoskeleton for crouch gait in children with

Toward a hybrid exoskeleton for crouch gait in children with


